



 Sol 1891, November 30, 2017, update by MSL scientist Mark Salvatore: Even before we started planning today’s activities, we knew there would be a chance that we would be limited on the amount of data returned to Earth following the previous drive. This turned out to be true, as a data relay from the Mars Reconnaissance Orbiter did not make it down to JPL in time for us to have full Navcam imaging coverage of the area surrounding the rover and in the drive direction. Fortunately, the limited data availability did not significantly influence our capabilities for the day, which is a true testament to the science team, rover planners, and everyone involved in the daily operations!
Sol 1891, November 30, 2017, update by MSL scientist Mark Salvatore: Even before we started planning today’s activities, we knew there would be a chance that we would be limited on the amount of data returned to Earth following the previous drive. This turned out to be true, as a data relay from the Mars Reconnaissance Orbiter did not make it down to JPL in time for us to have full Navcam imaging coverage of the area surrounding the rover and in the drive direction. Fortunately, the limited data availability did not significantly influence our capabilities for the day, which is a true testament to the science team, rover planners, and everyone involved in the daily operations!
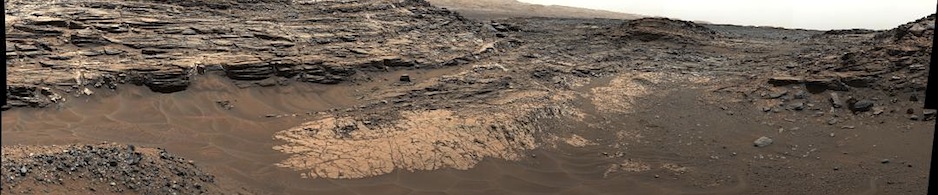
As the data that are available do not show great bedrock exposures, and because utilizing Curiosity’s arm would have likely required all of the data to be downlinked, the science team decided to focus on remote analyses in the immediate vicinity of the rover and then to hit the road for our next stop on Vera Rubin Ridge. The science plan includes long-distance remote imaging with the ChemCam instrument, as well as a Mastcam calibration image and documentation of the automatically selected ChemCam active target executed in the previous plan. Mastcam will also take a multispectral image of the region where Curiosity will be headed over the next few days, in an effort to fully characterize the spectral diversity of this location and to compare with orbital remote sensing data. [More at link, including late-breaking update]