



 Sol 2011, April 2, 2018, update by MSL scientist Ryan Anderson: After the weekend drive, the rover ended up in a spot that was a little too unstable to pass the Slip Risk Assessment Process (SRAP). That means that there is a slight chance that the rover’s footing might shift if the robotic arm is extended, which is not ideal for the safety of our contact science instruments, so for the Sol 2011 plan we chose not to use the arm and instead focused on remote sensing.
Sol 2011, April 2, 2018, update by MSL scientist Ryan Anderson: After the weekend drive, the rover ended up in a spot that was a little too unstable to pass the Slip Risk Assessment Process (SRAP). That means that there is a slight chance that the rover’s footing might shift if the robotic arm is extended, which is not ideal for the safety of our contact science instruments, so for the Sol 2011 plan we chose not to use the arm and instead focused on remote sensing.
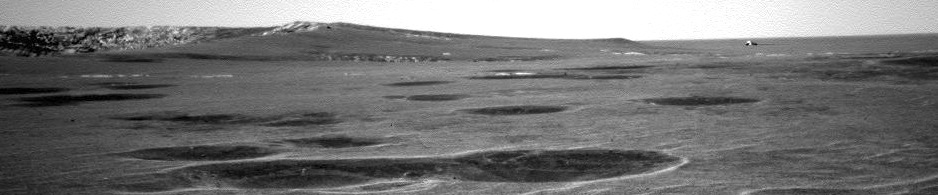
The rover will start off with two ChemCam RMI mosaics of the Peace Vallis alluvial fan on the crater floor. The air is clear right now, but is expected to get dusty later this season, so it is important to get these very long distance images while we can. Next, ChemCam will measure the chemistry of the targets “Morven”, “Insch”, and “Pabay”. Mastcam then will take four mosaics: two that cover the three ChemCam targets… [More at link]