



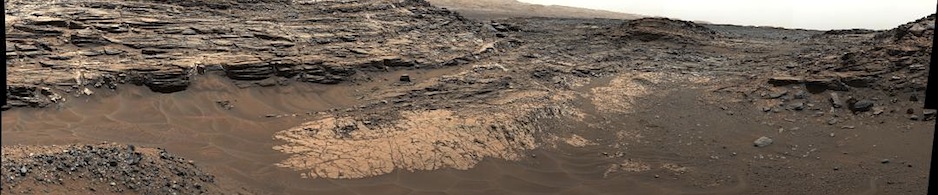
 Sols 2097-99, July 2, 2018, update by MSL scientist Christopher Edwards: Curiosity stopped its drive a bit earlier than anticipated. It so happens that the autonomous software onboard Curiosity designed to keep it driving safely kicked in and ended the drive short of the planned distance. When things like this happen, it’s a bit of a setback to science, but keeping the rover safe is priority number one. Not only did the drive stop short, but Curiosity actually ended up in a location where there wasn’t a good surface model, triggering the Slip Risk Assessment Process (SRAP) to fail. A failed SRAP means that Curiosity cannot safely carryout any arm-based activities, so the science team resorted to remote sensing activities using the cameras and ChemCam to continue to assess the Vera Rubin Ridge… [More at link]
Sols 2097-99, July 2, 2018, update by MSL scientist Christopher Edwards: Curiosity stopped its drive a bit earlier than anticipated. It so happens that the autonomous software onboard Curiosity designed to keep it driving safely kicked in and ended the drive short of the planned distance. When things like this happen, it’s a bit of a setback to science, but keeping the rover safe is priority number one. Not only did the drive stop short, but Curiosity actually ended up in a location where there wasn’t a good surface model, triggering the Slip Risk Assessment Process (SRAP) to fail. A failed SRAP means that Curiosity cannot safely carryout any arm-based activities, so the science team resorted to remote sensing activities using the cameras and ChemCam to continue to assess the Vera Rubin Ridge… [More at link]
-
Recent Posts
Archives
Links
general
mission instruments
- CRISM: Compact Reconnaissance Imaging Spectrometer for Mars
- CTX: Context Camera
- HiRISE: High Resolution Imaging Science Experiment
- MARSIS: Mars Advanced Radar for Subsurface and Ionosphere Sounding
- SHARAD: Shallow Radar
- THEMIS: Thermal Emission Imaging System
missions
- All Mars missions list
- Curiosity rover
- ExoMars
- Hope (al-Amal) orbiter
- InSight
- Mars Atmosphere and Volatile Evolution Mission (MAVEN)
- Mars Exploration Rovers (MER)
- Mars Express (MEX)
- Mars Odyssey
- Mars Orbiter Mission (MOM) / Mangalyaan
- Mars Reconnaissance Orbiter (MRO)
- Mars Science Laboratory (MSL)
- Perseverance Rover
- Tianwen-1 orbiter/rover
news